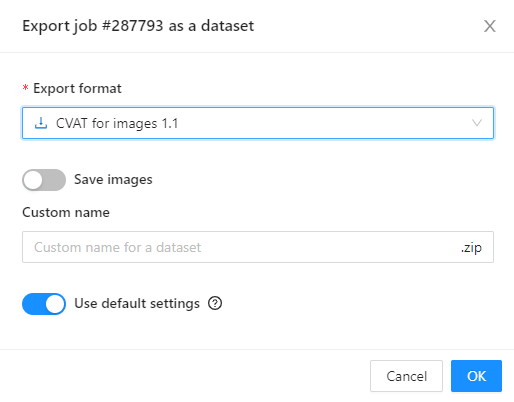
In CVAT, you have the option to export data in various formats.
The choice of export format depends on the type of annotation as
well as the intended future use of the dataset.
Uploaded file: either an XML file or a
.zip file containing the aforementioned structures.
2 - Datumaro
How to export and import data in Datumaro format
Datumaro serves as a versatile format capable of handling complex
dataset and annotation transformations,
format conversions, dataset statistics, and merging, among other features.
It functions as the dataset support provider within CVAT.
Essentially, anything you can do in CVAT, you can also achieve
in Datumaro, but with the added benefit of specialized dataset operations.
The downloaded file is a zip archive with the following structure:
taskname.zip/
├── annotations/
│ └── default.json # fully description of classes and all dataset items└── images/ # if the option `save images` was selected └── default
├── image1.jpg
├── image2.jpg
├── ...
Import annotations in Datumaro format
supported annotations: any 2D shapes, labels
supported attributes: any
Uploaded file: a zip archive of the following structure:
<archive_name>.zip/
└── annotations/
├── subset1.json # fully description of classes and all dataset items └── subset2.json # fully description of classes and all dataset items
JSON annotations files in the annotations directory should have similar structure:
The LabelMe format is often used for image segmentation tasks in computer vision.
While it may not be specifically tied to any particular models,
it’s designed to be versatile and can be easily converted to formats
that are compatible with popular frameworks like TensorFlow or PyTorch.
The MOT (Multiple Object Tracking) sequence format is widely
used for evaluating multi-object tracking algorithms, particularly in
the domains of pedestrian tracking, vehicle tracking, and more.
The MOT sequence format essentially contains frames of video
along with annotations that specify object locations and identities over time.
The MOT (Multiple Object Tracking) sequence format is widely
used for evaluating multi-object tracking algorithms, particularly in
the domains of pedestrian tracking, vehicle tracking, and more.
The MOT sequence format essentially contains frames of video
along with annotations that specify object locations and identities over time.
supported annotations: Rectangle and Polygon tracks
MOTS PNG import
Uploaded file: a zip archive of the structure above
supported annotations: Polygon tracks
6 - COCO
How to export and import data in COCO format
A widely-used machine learning structure, the COCO dataset is instrumental
for tasks involving object identification and image segmentation.
This format is compatible with projects that employ bounding boxes or
polygonal image annotations.
is_crowd This can either be a checkbox or an integer
(with values of 0 or 1). It indicates that the instance
(or group of objects) should include an RLE-encoded mask in the segmentation field.
All shapes within the group coalesce into a single, overarching mask,
with the largest shape setting the properties for the entire object group.
score: This numerical field represents the annotation score.
Arbitrary attributes: These will be stored within the attributes
section of the annotation.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
When exporting a dataset from a Project, subset names will mirror those used within the project itself.
Otherwise, a singular default subset will be created to house all the dataset information.
The section aligns with one of the specific COCO tasks,
such as instances, panoptic, image_info, labels, captions, or stuff.
COCO import
Uplod format: a single unpacked *.json or a zip archive with the structure described above or
here
(without images).
supported annotations: Polygons, Rectangles (if the segmentation field is empty)
supported tasks: instances, person_keypoints (only segmentations will be imported), panoptic
click Upload annotation button,
choose COCO 1.1 and select instances_val2017.json
annotation file. It can take some time.
7 - COCO Keypoints
How to export and import data in COCO Keypoints format
The COCO Keypoints format is designed specifically for human pose estimation tasks, where the objective
is to identify and localize body joints (keypoints) on a human figure within an image.
This specialized format is used with a variety of state-of-the-art models focused on pose estimation.
is_crowd This can either be a checkbox or an integer
(with values of 0 or 1). It indicates that the instance
(or group of objects) should include an RLE-encoded mask in the segmentation field.
All shapes within the group coalesce into a single, overarching mask,
with the largest shape setting the properties for the entire object group.
score: This numerical field represents the annotation score.
Arbitrary attributes: These will be stored within the attributes
section of the annotation.
Tracks: Not supported.
Downloaded file is a .zip archive with the following structure:
Export the Datumaro project in coco / coco_person_keypoints formats
datum export -f coco -p path/to/project [-- --save-images]
This way, one can export CVAT points as single keypoints or
keypoint lists (without the visibility COCO flag).
8 - Pascal VOC
How to export and import data in Pascal VOC format
The Pascal VOC (Visual Object Classes) format
is one of the earlier established benchmarks for object classification and detection,
which provides a standardized image data set for object class recognition.
The export data format is XML-based and has been widely adopted in computer vision tasks.
It must be possible for CVAT to match the frame name and file name
from annotation .xml file (the filename tag, e. g.
<filename>2008_004457.jpg</filename> ).
There are 2 options:
full match between frame name and file name from annotation .xml
(in cases when task was created from images or image archive).
match by frame number. File name should be <number>.jpg
or frame_000000.jpg. It should be used when task was created from video.
How to create a task from Pascal VOC dataset
Download the Pascal Voc dataset (Can be downloaded from the
PASCAL VOC website)
Create a CVAT task with the following labels:
aeroplane bicycle bird boat bottle bus car cat chair cow diningtable
dog horse motorbike person pottedplant sheep sofa train tvmonitor
You can add ~checkbox=difficult:false ~checkbox=truncated:false
attributes for each label if you want to use them.
click Upload annotation button, choose Pascal VOC ZIP 1.1
and select the zip file with annotations from previous step.
It may take some time.
9 - Segmentation Mask
How to export and import data in Segmentation Mask format
Segmentation masks format is often used in the training of models for tasks
like semantic segmentation, instance segmentation, and panoptic segmentation.
Segmentation Mask in CVAT is
a format created by CVAT engineers
inside the Pascal VOC
Segmentation mask export
For export of images:
Supported annotations: Bounding Boxes, Polygons.
Attributes: Not supported.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
taskname.zip/
├── labelmap.txt # optional, required for non-VOC labels├── ImageSets/
│ └── Segmentation/
│ └── default.txt # list of image names without extension├── SegmentationClass/ # merged class masks│ ├── image1.png
│ └── image2.png
└── SegmentationObject/ # merged instance masks ├── image1.png
└── image2.png
# labelmap.txt# label : color (RGB) : 'body' parts : actionsbackground:0,128,0::
aeroplane:10,10,128::
bicycle:10,128,0::
bird:0,108,128::
boat:108,0,100::
bottle:18,0,8::
bus:12,28,0::
The mask is a png image that can have either 1 or 3 channels.
Each pixel in the image has a color that corresponds to a specific label.
The colors are generated according to the Pascal VOC
algorithm.
By default, the color (0, 0, 0) is used to represent the background.
Segmentation mask import
Uploaded file: a zip archive of the following structure:
It is also possible to import grayscale (1-channel) PNG masks.
For grayscale masks provide a list of labels with the number of lines equal
to the maximum color index on images. The lines must be in the right order
so that line index is equal to the color index. Lines can have arbitrary,
but different, colors. If there are gaps in the used color
indices in the annotations, they must be filled with arbitrary dummy labels.
Example:
q:0,128,0:: # color index 0
aeroplane:10,10,128:: # color index 1
_dummy2:2,2,2:: # filler for color index 2
_dummy3:3,3,3:: # filler for color index 3
boat:108,0,100:: # color index 3
...
_dummy198:198,198,198:: # filler for color index 198
_dummy199:199,199,199:: # filler for color index 199
...
the last label:12,28,0:: # color index 200
supported shapes: Polygons
10 - YOLO
How to export and import data in YOLO format
YOLO, which stands for “You Only Look Once,” is a renowned framework
predominantly utilized for real-time object detection tasks.
Its efficiency and speed make it an ideal choice for many applications.
While YOLO has its unique data format,
this format can be tailored to suit other object detection models as well.
The downloaded file is a .zip archive with the following structure:
archive.zip/
├── obj.data
├── obj.names
├── obj_<subset>_data
│ ├── image1.txt
│ └── image2.txt
└── train.txt # list of subset image paths# the only valid subsets are: train, valid# train.txt and valid.txt:obj_<subset>_data/image1.jpg
obj_<subset>_data/image2.jpg
# obj.data:classes=3# optionalnames= obj.names
train= train.txt
valid= valid.txt # optionalbackup= backup/ # optional# obj.names:cat
dog
airplane
# image_name.txt:# label_id - id from obj.names# cx, cy - relative coordinates of the bbox center# rw, rh - relative size of the bbox# label_id cx cy rw rh1 0.3 0.8 0.1 0.3
2 0.7 0.2 0.3 0.1
Each annotation file, with the .txt extension,
is named to correspond with its associated image file.
For example, frame_000001.txt serves as the annotation for the
frame_000001.jpg image.
The structure of the .txt file is as follows:
each line describes a label and a bounding box
in the format label_id cx cy w h.
The file obj.names contains an ordered list of label names.
YOLO import
Uploaded file: a zip archive of the same structure as above
It must be possible to match the CVAT frame (image name)
and annotation file name. There are 2 options:
full match between image name and name of annotation *.txt file
(in cases when a task was created from images or archive of images).
match by frame number (if CVAT cannot match by name). File name
should be in the following format <number>.jpg .
It should be used when task was created from a video.
How to create a task from YOLO formatted dataset (from VOC for example)
Follow the official guide (see Training YOLO on VOC section)
and prepare the YOLO formatted annotation files.
Zip train images
zip images.zip -j -@ < train.txt
Create a CVAT task with the following labels:
aeroplane bicycle bird boat bottle bus car cat chair cow diningtable dog
horse motorbike person pottedplant sheep sofa train tvmonitor
Select images. zip as data. Most likely you should use share
functionality because size of images. zip is more than 500Mb.
See Creating an annotation task
guide for details.
Create obj.names with the following content:
aeroplane
bicycle
bird
boat
bottle
bus
car
cat
chair
cow
diningtable
dog
horse
motorbike
person
pottedplant
sheep
sofa
train
tvmonitor
Zip all label files together (we need to add only label files that correspond to the train subset):
cat train.txt |whileread p;doecho${p%/*/*}/labels/${${p##*/}%%.*}.txt;done| zip labels.zip -j -@ obj.names
Click Upload annotation button, choose YOLO 1.1 and select the zip
file with labels from the previous step.
11 - TFRecord
How to export and import data in TFRecord format
The TFRecord format is tightly integrated with TensorFlow
and is commonly used for training models within the TensorFlow ecosystem.
TFRecord is an incredibly flexible data format.
We strive to align our implementation with the
format employed by the TensorFlow Object Detection API,
making only minimal changes as necessary.
This format does not have a fixed structure, so in
CVAT the following structure is used:
image_feature_description={'image/filename':tf.io.FixedLenFeature([],tf.string),'image/source_id':tf.io.FixedLenFeature([],tf.string),'image/height':tf.io.FixedLenFeature([],tf.int64),'image/width':tf.io.FixedLenFeature([],tf.int64),# Object boxes and classes.'image/object/bbox/xmin':tf.io.VarLenFeature(tf.float32),'image/object/bbox/xmax':tf.io.VarLenFeature(tf.float32),'image/object/bbox/ymin':tf.io.VarLenFeature(tf.float32),'image/object/bbox/ymax':tf.io.VarLenFeature(tf.float32),'image/object/class/label':tf.io.VarLenFeature(tf.int64),'image/object/class/text':tf.io.VarLenFeature(tf.string),}
TFRecord export
For export of images:
Supported annotations: Bounding Boxes, Polygons
(as masks, manually over Datumaro)
Attributes: Not supported.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
cat <path to VOCdevkit>/VOC2007/ImageSets/Main/train.txt |whileread p;doecho <path to VOCdevkit>/VOC2007/JPEGImages/${p}.jpg ;done| zip images.zip -j -@
Create a CVAT task with the following labels:
aeroplane bicycle bird boat bottle bus car cat chair cow diningtable dog horse motorbike person pottedplant sheep sofa train tvmonitor
Zip pascal.tfrecord and label_map.pbtxt files together
zip anno.zip -j <path to pascal.tfrecord> <path to label_map.pbtxt>
Click Upload annotation button, choose TFRecord 1.0 and select the zip file
with labels from the previous step. It may take some time.
12 - ImageNet
How to export and import data in ImageNet format
The ImageNet is typically used for a variety of computer vision tasks,
including but not limited to image classification, object detection,
and segmentation.
It is widely recognized and used in the training and
benchmarking of various machine learning models.
The downloaded file is a .zip archive with the following structure:
# if we save images:taskname.zip/
├── label1/
| ├── label1_image1.jpg
| └── label1_image2.jpg
└── label2/
├── label2_image1.jpg
├── label2_image3.jpg
└── label2_image4.jpg
# if we keep only annotation:taskname.zip/
├── <any_subset_name>.txt
└── synsets.txt
ImageNet import
Uploaded file: a zip archive of the structure above
supported annotations: Labels
13 - Wider Face
How to export and import data in Wider Face format
The WIDER Face dataset is widely used for face detection tasks.
Many popular models for object detection and face detection
specifically are trained on this dataset for benchmarking and deployment.
The CamVid (Cambridge-driving Labeled Video Database) format is most commonly used
in the realm of semantic segmentation tasks. It is particularly useful for training
and evaluating models for autonomous driving and other vision-based robotics
applications.
The downloaded file is a .zip archive with the following structure:
taskname.zip/
├── label_colors.txt # optional, required for non-CamVid labels├── <any_subset_name>/
| ├── image1.png
| └── image2.png
├── <any_subset_name>annot/
| ├── image1.png
| └── image2.png
└── <any_subset_name>.txt
# label_colors.txt (with color value type)# if you want to manually set the color for labels, configure label_colors.txt as follows:# color (RGB) label000 Void
6412864 Animal
1920128 Archway
0128192 Bicyclist
012864 Bridge
# label_colors.txt (without color value type)# if you do not manually set the color for labels, it will be set automatically:# labelVoid
Animal
Archway
Bicyclist
Bridge
A mask in the CamVid dataset is typically a .png
image with either one or three channels.
In this image, each pixel is assigned a specific color
that corresponds to a particular label.
By default, the color (0, 0, 0)—or black—is used
to represent the background.
CamVid import
For import of images:
Uploaded file: a .zip archive of the structure above
supported annotations: Polygons
15 - VGGFace2
How to export and import data in VGGFace2 format
The VGGFace2 is primarily designed for face recognition tasks and is
most commonly used with deep learning models specifically designed for face recognition,
verification, and similar tasks.
Uploaded file: a zip archive of the structure above
supported annotations: Rectangles, Points (landmarks - groups of 5 points)
16 - Market-1501
How to export and import data in Market-1501 format
The Market-1501 dataset is widely used for person re-identification tasks.
It is a challenging dataset that has gained significant attention
in the computer vision community.
Th downloaded file is a .zip archive with the following structure:
taskname.zip/
├── bounding_box_<any_subset_name>/
│ └── image_name_1.jpg
└── query
├── image_name_2.jpg
└── image_name_3.jpg
# if we keep only annotation:taskname.zip/
└── images_<any_subset_name>.txt
# images_<any_subset_name>.txtquery/image_name_1.jpg
bounding_box_<any_subset_name>/image_name_2.jpg
bounding_box_<any_subset_name>/image_name_3.jpg
# image_name = 0001_c1s1_000015_00.jpg0001 - person id
c1 - camera id (there are totally 6 cameras)s1 - sequence
000015 - frame number in sequence
00 - means that this bounding box is the first one among the several
Market-1501 import
Uploaded file: a zip archive of the structure above
supported annotations: Label market-1501 with attributes (query, person_id, camera_id)
17 - ICDAR13/15
How to export and import data in ICDAR13/15 format
ICDAR 13/15 formats are typically used for text detection and recognition tasks
and OCR (Optical Character Recognition).
These formats are usually paired with specialized text detection and recognition models.
Uploaded file: a zip archive of the structure above
Word recognition task:
supported annotations: Label icdar with attribute caption
Text localization task:
supported annotations: Rectangles and Polygons with label icdar
and attribute text
Text segmentation task:
supported annotations: Rectangles and Polygons with label icdar
and attributes index, text, color, center
18 - Open Images
How to export and import data in Open Images format
The Open Images format is based on a large-scale, diverse dataset
that contains object detection, object segmentation, visual relationship,
and localized narratives annotations.
Its export data format is compatible with many object detection and segmentation models.
Tags: score must be defined for labels as text or number.
The confidence level from 0 to 1.
Bounding boxes: score must be defined for labels as text or number.
The confidence level from 0 to 1. occluded as both UI option
and a separate attribute. Whether the object is occluded by another object. truncated
must be defined for labels as checkbox. Whether the object extends beyond the boundary of the image.
is_group_of must be defined for labels as checkbox. Whether the object
represents a group of objects of the same class. is_depiction must be
defined for labels as checkbox. Whether the object is a depiction (such as a drawing)
rather than a real object. is_inside must be defined
for labels as checkbox. Whether the object is seen from the inside.
Masks:
box_id must be defined for labels as text. An identifier for
the bounding box associated with the mask.
predicted_iou must be defined for labels as text or number.
Predicted IoU value with respect to the ground truth.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
Image ids in the <subset_name>-image_ids_and_rotation.csv should match with
image names in the task.
19 - Cityscapes
How to export and import data in Cityscapes format
The Cityscapes format is a widely-used standard in the field of computer vision,
particularly for tasks involving semantic and instance segmentation in urban scenes.
This dataset format typically comprises high-resolution images of
cityscapes along with detailed pixel-level annotations.
Each pixel is labeled with a category such as “road,” “pedestrian,” or “vehicle,” making
it a valuable resource for training and validating machine learning
models aimed at understanding urban environments. It’s a go-to choice
for researchers and professionals working on autonomous vehicles,
robotics, and smart cities.
is_crowd boolean, should be defined for labels as checkbox.
Specifies if the annotation label can distinguish between different instances.
If False, the annotation id field encodes the instance id.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
label_color.txt a file that describes the color for each label
# label_color.txt example
# r g b label_name
0 0 0 background
0 255 0 tree
...
*_gtFine_color.png class labels encoded by its color.
*_gtFine_labelIds.png class labels are encoded by its index.
*_gtFine_instanceIds.png class and instance labels encoded
by an instance ID. The pixel values encode class and the individual instance:
the integer part of a division by 1000 of each ID provides class ID,
the remainder is the instance ID. If a certain annotation describes multiple
instances, then the pixels have the regular ID of that class
Cityscapes annotations import
Uploaded file: a zip archive with the following structure:
Create a task with the labels you need
or you can use the labels and colors of the original dataset.
To work with the Cityscapes format, you must have a black color label
for the background.
After creating the task, upload the Cityscapes annotations as described
in the previous section.
20 - KITTI
How to export and import data in KITTI format
The KITTI format is widely used for a range of computer
vision tasks related to autonomous driving, including
but not limited to 3D object detection, multi-object tracking,
and scene flow estimation. Given its special focus on
automotive scenes, the KITTI format is generally
used with models that are designed or adapted for these types of tasks.
occluded (Available both as a UI option and a separate attribute)
Denotes that a major portion of the object within
the bounding box is obstructed by another object.
truncated (Only applicable to bounding boxes)
Must be represented as checkboxes for labels.
Suggests that the bounding box does not
encompass the entire object; some part is cut off.
is_crowd (Only valid for polygons). Should be indicated
using checkboxes for labels.
Signifies that the annotation encapsulates
multiple instances of the same object class.
Tracks: Not supported.
The downloaded file is a .zip archive with the following structure:
└─ annotations.zip/
├── label_colors.txt # list of pairs r g b label_name
├── labels.txt # list of labels
└── default/
├── label_2/ # left color camera label files
│ ├── <image_name_1>.txt
│ ├── <image_name_2>.txt
│ └── ...
├── instance/ # instance segmentation masks
│ ├── <image_name_1>.png
│ ├── <image_name_2>.png
│ └── ...
├── semantic/ # semantic segmentation masks (labels are encoded by its id)
│ ├── <image_name_1>.png
│ ├── <image_name_2>.png
│ └── ...
└── semantic_rgb/ # semantic segmentation masks (labels are encoded by its color)
├── <image_name_1>.png
├── <image_name_2>.png
└── ...
KITTI annotations import
You can upload KITTI annotations in two ways:
rectangles for the detection task and
masks for the segmentation task.
For detection tasks the uploading archive should have the following structure:
└─ annotations.zip/
├── labels.txt # optional, labels list for non-original detection labels
└── <subset_name>/
├── label_2/ # left color camera label files
│ ├── <image_name_1>.txt
│ ├── <image_name_2>.txt
│ └── ...
For segmentation tasks the uploading archive should have the following structure:
└─ annotations.zip/
├── label_colors.txt # optional, color map for non-original segmentation labels
└── <subset_name>/
├── instance/ # instance segmentation masks
│ ├── <image_name_1>.png
│ ├── <image_name_2>.png
│ └── ...
├── semantic/ # optional, semantic segmentation masks (labels are encoded by its id)
│ ├── <image_name_1>.png
│ ├── <image_name_2>.png
│ └── ...
└── semantic_rgb/ # optional, semantic segmentation masks (labels are encoded by its color)
├── <image_name_1>.png
├── <image_name_2>.png
└── ...
All annotation files and masks should have structures
that are described in the original format specification.
21 - LFW
How to export and import data in LFW format
The Labeled Faces in the Wild (LFW) format
is primarily used for face verification and face recognition tasks.
The LFW format is designed to be straightforward and
is compatible with a variety of machine learning and deep learning frameworks.
The uploaded annotations file should be a zip file with the following structure:
<archive_name>.zip/
└── annotations/
├── landmarks.txt # list with landmark points for each image ├── pairs.txt # list of matched and mismatched pairs of person └── people.txt # optional file with a list of persons name
Full information about the content of annotation files is available
here
Example: create task with images and upload LFW annotations into it
This is one of the possible ways to create a task and add LFW annotations for it.
On the task creation page:
Add labels that correspond to the names of the persons.
For each label define text attributes with names positive_pairs and
negative_pairs
Add images using zip archive from local repository: